Солнечные батареи слежение за солнцем. Поворотное устройство слежения за солнцем? Технические характеристики данного комплекта

 Live Journal
Live Journal Facebook
Facebook Twitter
TwitterКак известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем
или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.
Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.

Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR". Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR" будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| Операционный усилитель | LM1458 | 1 | Аналог: К140УД20 | В блокнот | ||
| Биполярный транзистор | BD139 | 2 | Аналоги: КТ815Г, КТ961А | В блокнот | ||
| Биполярный транзистор | BD140 | 2 | Аналоги: КТ814Г,КТ626В | В блокнот | ||
| Выпрямительный диод | 1N4004 | 4 | Аналог: КД243Г | В блокнот | ||
| Резистор | 15 кОм | 1 | В блокнот | |||
| Резистор | 47 кОм | 1 | В блокнот | |||
| Подстроечный резистор | 100 кОм | 1 |
Существуют некоторые хитрости, позволяющие, немного модифицировав основную систему, получить больше энергии от солнца. Первая из них – следить за солнцем, а вторая – за точкой максимальной мощности солнечных батарей.Слежение за солнцем осуществляется с помощью солнечного трекера, с которого я и начну эту статью. Следующее видео демонстирует принцип действия трекера для солнечных панелей.
После монтажа солнечного трекера выработка энергии увеличится в 1,6 раза благодаря более длительному воздействию солнца на панели, а также оптимизации угла установки солнечных панелей по отношению к солнцу. Стоимость готового солнечного трекера составит около 52 000 рублей. Поскольку он сможет удержать всего пару панелей с общей мощностью до 600Вт, окупится такая система нескоро. Но сделать такое устройство можно и самостоятельно, причем самодельные трекеры довольно популярны.При слежении за солнцем есть следующие главные задачи: 1. Создание крепкой платформы, способной выдержать и вес самих панелей, и порывы ветра.2. Создание механики поворота тяжелой платформы с высокой парусностью.3. Разработка логики управления механикой для слежения за солнцем.Итак, пункт первый. Массивы батарей лучше разместить кратно необходимому напряжению, при этом они не должны затенять друг друга.
Для трекера потребуются крепкое железо и мощный фундамент. Для управления поворотной платформой оптимально подойдут актуаторы. На следующем снимке можно рассмотреть механику управления.

Такой трекер позволит контролировать положение солнечных панелей сразу в двух плоскостях. Но при желании можно настроить управление только по горизонтали, а по вертикали изменять угол пару два раза в год (осенью и весной).Создавая логику всей системы можно выбрать один из нескольких вариантов: 1. Следить за максимально яркой точкой.2. Установить наклон и поворот по таймеру (для каждого дня всегда известны время восхода и захода солнца).3. Комбинированный вариант, предусматривающий постоянство угла поворота и поиск максимальной яркости.Для первого способа есть два решения: соорудить трекер самостоятельно или купить готовый китайский, стоимостью около 100 долларов.


Но поскольку сделать такое устройство довольно несложно любому, кто разбирается в принципах работы контроллеров, многие предпочитают сделать все самостоятельно, при этом самодельный трекер обойдется в 10 раз дешевле.
Подробности изготовления солнечного трекера можно узнать на профильном форуме, где оптимальные конструкции уже вычислены и подобрано наилучшее оборудование. Слежение за МРРТ (точка максимальной мощности солнечных батарей) Для этой цели существует два типа солнечных контроллеров. Контроллер МРРТ (Maximum Power Point Tracking) следит за солнцем с другой позиции системы. Для обьяснения привожу следующий график.

Как видно из графика, максимум снимаемой мощности будет получен в точке максимальной мощности, которая непременно окажется на зеленой линии. Это невозможно для обычного ШИМ контроллера. Используя МРРТ контроллер можно также подключить последовательно соединенные солнечные панели. Такой способ позволит ощутимо снизить потери энергии в процессе транспортировки от солнечных батарей до аккумуляторов. Экономически целесообразно устанавливать МРРТ контроллеры при мощности СП, превышающей 300-400 Вт. Вполне обоснованной будет покупка солнечного контроллера «с запасом», если только вы не создаете мощную энергосистему, которая перекроет потребности дома с избытком. Последовательно наращивая число солнечных батарей, я получил мощность 800 Вт, чего вполне достаточно для загородного дачного домика летом.В моем примере от энергосистемы в среднем ожидается по 4 кВт*ч электрической энергии в день с апреля по август. Такого количества энергии вполне достаточно для комфорта семьи из 4 человек при условии отказа от пользования электроплитой и микроволновой печью. Мощным потребителем энергии является бойлер для подогрева воды. Для 80 литрового бойлера в частном доме потребуется как раз приблизительно 4,5кВт*ч энергии. Таким образом, создаваемая автономная система окупится хотя бы при нагреве воды.Предыдущая статья была посвящена гибридному инвертору, позволяющему забирать энергию преимущественно от солнечных батарей, получая от сети только недостающее количество. Компания МикроАрт уже наладила выпуск МРРТ-контроллеров, которые могут быть связаны с инверторами этой же фирмы по общей шине. Поскольку гибридный инвертор МикроАрт я уже установил, этот вариант для меня особенно удобен.Главным достоинством этого контроллера для меня стала возможность подкачки нужного количества электричества, чтобы не заимствовать энергию от аккумулятора, снижая его ресурс. Самым популярным и при этом оптимальным по соотношению напряжение/ток является Контроллер ECO Энергия MPPT Pro 200/100. Он способен поддерживать входное напряжение до 200 В и выходной ток до 100 А. Мои аккумуляторы собраны на 24 В (напряжение аккумуляторов 12/24/48/96 В), так что максимальная мощность от контроллера составит 2400 Вт, таким образом я получаю двукратный запас при наращивании солнечных батарей. Максимальная мощность контроллера – 11 кВт при 110 В на аккумуляторах (буферное напряжение).Связь контроллера с гибридным инвертором МАП SIN Энергия Pro HYBRID v.1 24В поддерживается по шине 12С. При этом возможно мгновенное добавление мощности в случае, когда инвертор выдает информацию о повышенном потреблении энергии. Поскольку оба устройства от одного производителя – понадобилось лишь включить шнурки в нужные разьемы устройств и активировать нужные параметры.Продолжая исследовать возможности контроллера, я обнаружил три реле, которые можно запрограммировать. Например, при солнечной погоде, если дом не потребляет электроэнергию, можно подогреть дополнительный бойлер или бассейн. Другой вариант - погода пасмурная и напряжение аккумуляторов снижено до критического уровня, инвертор может вообще отключиться, а энергия потребляется. В таком случае возможен запуск отдельного бензо/дизель генератора, для чего достаточно просто замкнуть реле. При этом в генераторе должен быть сухой контакт запуска или же отдельная система автоматического пуска – САП (другое название – АВР, Автоматический Ввод Резерва). Генератор у меня простой китайский, но стартер имеется. Поинтересовавшись автоматизацией его запуска, и выяснив, что МикроАрт уже давно выпускает собственную автоматику, я был очень этим обрадован.Вернемся к монтажу контроллера. Здесь все стандартно: сначала нужно подключить клеммы аккумулятора, потом клеммы солнечных батарей, после чего настраиваются параметры. При подключении внешнего датчика тока можно обнаружить мощность, потребляемую инвертором в режиме реального времени.На следующем фото можно увидеть, как работает инвертор в гибридном режиме (получая часть энергии – от сети, основную же часть – от солнечных батарей).

Чтобы продемонстрировать работу солнечного контроллера с любым другим инвертором от стороннего производителя, контроллер специально подключается с помощью внешнего датчика тока.
Итоги Реальные характеристики контроллера полностью соответствуют заявленным. Он действительно подкачивает энергию, даже при подключении к «чужому» инвертору через датчик тока. Гибридный инвертор, как и планировалось, качает в сеть энергию солнца (на фотографии видно, что100 Вт, а это половина из 200 Вт потребляемых, поступает от солнечных батарей. То есть, минимальные 100 Вт будут забираться контроллером из сети, а недостающие – поступать от солнца. Такова особенность устройства). Таким образом, комплект начал окупать себя уже с момента подключения. А начиная с мая можно рассчитывать и на полное покрытие энергетических нужд солнечными батареями.Последующая статья станет заключительной, в ней будут сравнены три солнечные контроллера, которые у меня уже имеются.
Солнечный трекер представляет собой электронно-механическую систему, предназначенную для наведения солнечных панелей на Солнце. Система отслеживает положение Солнца на небосводе, и управляет сервоприводом, который поворачивает панели в соответствующем направлении. Применение подобного трекера позволяет получить максимальную производительность от солнечных батарей.
Большинство самодельных трекеров встречающихся в интернете собраны на Arduino, для определения положения Солнца используются фотодатчики. В зависимости от степени освещенности и взаимного расположения фотодатчиков, выполняется поворот в сторону наибольшего освещения. У такого способа имеются недостатки: неизвестно как поведет себя система в облачную погоду; низкая помехозащищенность в плане реагирования на лунный свет и яркие источники света, а также на отдельные облака.
Из-за наличия вышеперечисленных недостатков, я разработал свой вариант экономичного солнечного трекера на сервоприводах, обеспечивающего слежение за Солнцем по всей видимой области неба в любое время, независимо от географического местоположения.
Метод слежения за Солнцем
Положение Солнца на небе можно определить не только по освещенности фотодатчиков, но и по формулам небесной механики исходя из географических координат точки наблюдения и точного времени. Сейчас будет много определений и формул, относящихся к небесной механике, так что приготовьтесь напрячь извилины). Для наведения солнечных панелей нужно определить горизонтальные координаты Солнца, это высота и азимут. Центр данной системы координат совпадает с местонахождением наблюдателя, расчеты ведутся относительно плоскости математического горизонта.
Высота h – это угол между плоскостью мат. горизонта и направлением на светило, отсчитывается от 0⁰ до +90⁰ к зениту, и от 0⁰ до -90⁰ к надиру.
Азимут A – угол между полуденной линией (грубо говоря, направление на юг) и линией пересечения плоскости мат. горизонта с плоскостью вертикального круга светила. Отсчитывается от точки юга в сторону суточного вращения небесной сферы в пределах 0⁰…360⁰, или от 0⁰ до +180⁰ к западу и от 0⁰ до −180⁰ к востоку. Горизонтальные координаты светила постоянно изменяются, вследствие суточного вращения Земли.
Ниже приведены формулы для вычисления высоты и азимута светила:
h = asin (sinδ ∙ sinϕ + cosδ ∙ cosϕ ∙ cost);
A = atan2 (cosδ ∙ sint , cosδ ∙ sinϕ ∙ cost – sinδ ∙ cosϕ),
где δ – склонение светила, t – часовой угол светила, ϕ – широта точки наблюдения (0⁰…+90⁰ для северного полушария, 0⁰…-90⁰ для южного, 0⁰ – экватор).
Расшифровка функции atan2(y, x):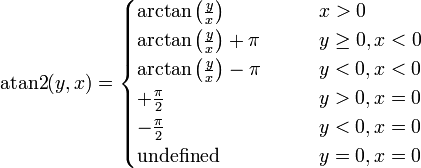
Как видно для расчета горизонтальных координат, необходимо вычислить склонение и часовой угол светила. Эти координаты относятся к первой экваториальной системе координат, где основной плоскостью является плоскость небесного экватора.
Склонение δ – угол между плоскостью небесного экватора и направлением на светило, отсчитывается от 0⁰ до +90⁰ в сторону северного полюса, и от 0⁰ до -90⁰ в сторону южного полюса.
Часовой угол t – двухгранный угол между плоскостью небесного меридиана и кругом склонения светила. Отсчитывается в сторону суточного вращения небесной сферы, к западу от верхней точки небесного экватора, в пределах 0⁰…360⁰, или от 00:00 до 24:00 (в часовой мере). Также часовой угол может измеряться в пределах от 0⁰ до 180⁰ (от 00:00 до 12:00) к западу и от 0⁰ до −180⁰ (от 00:00 до -12:00) к востоку. Часовой угол равен 0 в момент верхней кульминации светила, для Солнца в истинный полдень (не всегда совпадает с моментом времени, когда часы показывают 12:00 по местному времени).
Склонение Солнца изменяется в течение года (неравномерно) от -23,43⁰ до +23, 43⁰, вследствие орбитального движения Земли вокруг Солнца, и не связано с суточным вращением Земли. Определить склонение Солнца для любого дня года, проще всего из таблицы средних значений склонения за 4-х летний цикл. Таблицу можно скачать в конце статьи.
Часовой угол светила изменяется в течение суток (вследствие суточного вращения Земли), его можно вычислить, зная истинное солнечное время:
t = Tс.ист – 12:00ч, (-12:00…+11:59),
где Tс.ист – истинное солнечное время (00:00…23:59ч).
Истинное солнечное время можно вычислить, зная местное время, часовой пояс и долготу точки наблюдения:
Tс.ист = Tс.ср + EOT, или Tс.ист = UTC + λ + EOT,
где Tс.ср – среднее солнечное время в некоторой точке на Земле (зависит от долготы точки), UTC – всемирное координированное время, λ – долгота точки наблюдения в часовых единицах, EOT – уравнение времени.
Всемирное координированное время можно вычислить из местного времени (Tм) и часового пояса (N): UTC = Tм – N. Долгота местоположения λ отсчитывается от 0⁰ до 180⁰ к востоку от нулевого меридиана (восточная долгота), и от 0⁰ до -180⁰ к западу (западная долгота). При подстановке в вышеприведенную формулу, долготу нужно перевести в часовые единицы (1⁰ = 4 мин).
Уравнение времени EOT показывает разницу между средним солнечным временем и истинным солнечным времени, так как суточное движение Солнца неравномерно, вследствие эллиптичности орбиты Земли, а также наклона земной оси к плоскости эклиптики:
EOT = 9,87 ∙ sin2B – 7,53 ∙ cosB – 1,5 ∙ sinB,
где B = (360⁰ (N-81))/365, N – порядковый номер дня в году.
Таким образом, в течение года значение уравнения времени изменяется от -14,3 мин до +16,4 мин.
Ниже представлен график изменения уравнения времени в течение года: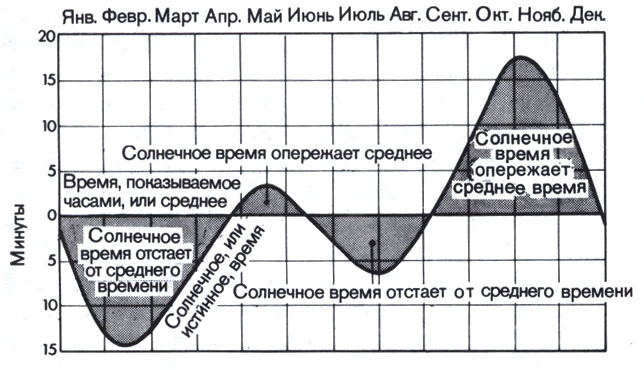
Мне предстояло загнать все эти расчеты в программу микроконтроллера, я не рискнул писать на ассемблере, поэтому стал изучать СИ, пришлось неделями возиться с формулами и расчетами, для получения правильного результата, попутно изучая СИ. В итоге мне удалось написать рабочую программу, при этом погрешность вычислений не превышает ±1⁰.
Описание схемы солнечного трекера
Солнечный трекер задумывался под небольшую солнечную батарею мощностью 2Вт и напряжением 6В, для заряда литий-ионного аккумулятора, но лучше использовать более мощную батарею не менее 4Вт. В качестве электроприводов я использовал сервоприводы MG996R (купить можно в Китае, ссылка приведена в конце статьи). Дополнительно приобрел специальные кронштейны для сборки альт-азимутальной установки (ссылка для заказа в конце статьи). Собранная конструкция позволяет ориентировать солнечную батарею по высоте и азимуту, сервопривод азимута при этом стоит неподвижно и вращает сервопривод высоты вместе с кронштейнами.
Ниже представлена схема солнечного трекера:![]()
Схема построена на микроконтроллере PIC16F876A, который обладает значительным объемом памяти, и содержит множество периферийных модулей. Вся конструкция питается от Li-ion аккумулятора, который соответственно заряжается от солнечной батареи через модуль, на основе микросхемы TP4056, это специализированный контроллер заряда Li-ion аккумуляторов (ссылка для заказа в конце статьи). Для определения текущего времени и даты, в схеме используется модуль (ссылка для заказа в конце статьи). Часы достаточно точные, уход времени составляет ±2 минуты в год, я уже писал подробную статью о них, желающие могут ознакомиться. Для отображения параметров используется цифровой индикатор на (ссылка для заказа в конце статьи).
Максимальное напряжение на Li-ion аккумуляторе не превышает 4,1В, что недостаточно для питания сервоприводов, поэтому в схему добавлен повышающий модуль на основе микросхемы MT3608 (ссылка для заказа в конце статьи). Минимальное входное напряжение модуля 2В, максимальный ток нагрузки 2А, на модуле имеется многооборотный переменный резистор для настройки выходного напряжения. Для экономии энергии, питание на сервоприводы подается не постоянно, а только для изменения положения вала. Питание коммутируется с помощью p-канального полевого транзистора VT1, модуль преобразователя также управляется от микроконтроллера.
На плате модуля не предусмотрен контакт для управления, поэтому необходимо дополнительно подпаять провод к 4-му выводу микросхемы MT3608, это вход вкл/выкл преобразователя. На плате этот вывод подключен к “+” питания, предварительно нужно обрезать дорожки подходящие к этому выводу (для этого придется выпаять микросхему), либо приподнять вывод над платой. На плате модуля установлен чип резистор делителя напряжения, увеличение сопротивления этого резистора также уменьшит потребление в спящем режиме, я заменил его на другой, с сопротивлением 9,1 кОм, изначально стоял на 2,2 кОм. После замены нужно выставить выходное напряжение примерно на 5-5,5В для питания сервоприводов, рисунок ниже:
Модуль часов также необходимо доработать, для снижения энергопотребления нужно выпаять микросхему памяти 24c32, светодиод “POWER”, а также резистор (200 Ом), через который внешнее напряжение питания подается на батарейку, зачем китайцы так сделали, остается непонятным, ведь батарейка не предназначена для заряда, см. рисунок ниже:
Светодиод HL1 установлен для индикации ошибки связи с часами DS3231 (по интерфейсу I2C), светодиод начинает мигать, если нет ответа от часов.
Сборка и настройка солнечного трекера
Сборку альт-азимутальной установки следует начинать, когда сервоприводы установлены в среднее положение, это происходит при первом включении устройства, на индикаторе при этом высвечивается надпись “Cent”. Сервопривод азимута желательно закрепить на пластине, которая будет служить основанием установки, либо на стойке, так чтобы выходной вал был направлен вертикально вверх. Далее необходимо прикрепить кронштейн сервопривода высоты, сначала нужно прикрутить к кронштейну втулку скольжения, затем переходную муфту. Кронштейн нужно выставить перпендикулярно длинной стороне сервопривода азимута, как показано на фото:
При сборке трудно достичь перпендикулярного положения, но это не обязательно, допустимы отклонения в пределах ±5-10 градусов. В дальнейшем программная корректировка устранит это отклонение.
После закрепления сервопривода высоты остается прикрутить несущий кронштейн, сначала примеряем переходную муфту на вал сервопривода, выбираем такое положение, чтобы несущий кронштейн после установки был направлен вертикально вверх. Опять же не обязательно выставлять точное положение, как я уже говорил ранее. Общий вид установки представлен на следующем фото:
Далее следует процедура корректировки крайних положений сервоприводов. Настройку следует выполнять на ровной поверхности, когда вал сервопривода по азимуту, расположен вертикально (ось вращения направлена по отвесной линии). После нажатия кнопки “Ввод” несущий кронштейн поворачивается в сторону условного Севера и принимает горизонтальное положение (на индикаторе высвечивается надпись “north”):
Если имеется отклонение от горизонтали, то нужно подрегулировать положение кронштейна кнопками “Уст” и “Разряд”. Таким образом, происходит настройка крайнего положения сервопривода. Далее при нажатии кнопки “Ввод”, кронштейн поворачивается в сторону условного Юга (на индикаторе надпись South). При необходимости отрегулируйте горизонтальное положение кронштейна, как описано выше.
Дальнейшее нажатие кнопки “Ввод” приведет к повороту кронштейна в сторону условного Востока (на индикаторе надпись EASt). Кнопками “Уст” и “Разряд” корректируют направление, при этом удобно ориентироваться на корпус сервопривода азимута, нужно чтобы кронштейн был направлен по длинной стороне корпуса, если смотреть сверху:
При следующем нажатии кнопки “Ввод”, кронштейн повернется в сторону Запада (на индикаторе надпись WESt), корректировка выполняется вышеописанным способом.
В результате корректировки, поворот кронштейна по высоте и азимуту выполняется в пределах 180⁰, значения корректировок сохраняются в EEPROM памяти микроконтроллера. После нажатия кнопки “Ввод”, кронштейн примет скорректированное направление на условный Юг. Для правильной ориентации солнечной батареи, направление на условный Юг должно указывать на реальную точку Юга в данной местности, а вал сервопривода по азимуту расположен вертикально по отвесной линии.
После очередного нажатия кнопки “Ввод”, следует настройка времени, даты, часового пояса, координат местоположения, длительности спящего режима. Соответственно для каждого параметра на индикаторе высвечиваются следующие надписи:
– местное время, по умолчанию 0 ч. 0 мин;
– долгота местоположения, по умолчанию -0 град. 0 мин. (для западной долготы ставится знак минус “-”);
– широта местоположения, по умолчанию -0 град. 0 мин. (для южной широты ставится знак минус “-”);
– часовой пояс, по умолчанию -0, (для западной долготы ставится знак минус “-”);
– длительность спящего режима, по умолчанию 1 мин.
Кнопками “Разряд” и “Уст” выставляют значения параметров, при нажатии кнопки “Ввод”, значения времени, и даты записываются в , остальные параметры сохраняются в EEPROM памяти микроконтроллера. После ввода всех параметров, на индикаторе высвечивается надпись SUCCES (в течение 1 сек, затем индикатор гаснет), далее установка наводится на Солнце, согласно введенным параметрам.
Для экономии энергии, наведение на Солнце выполняется через определенный промежуток времени, который задается в параметре длительность спящего режима. После наведения сервоприводы обесточиваются, микроконтроллер переходит в спящий режим, общее потребление трекера снижается до 160 мкА. Длительность “сна” можно задать в пределах 1-255 мин.
При повторном включении трекера (после отключения питания), сначала проверяется EEPROM память, если сохраненные параметры корректны, трекер продолжает слежение за Солнцем, при этом цифровой индикатор остается в спящем режиме и не включается, для экономии энергии. Можно вообще отключить питание индикатора после первоначального ввода параметров. Для повторного входа в режим корректировок, нужно удерживать кнопку “Уст” и подать питание на трекер. Если параметры, считанные из EEPROM, неверные или отсутствуют, также произойдет переход в режим корректировок.
Я дополнительно добавил в программу микроконтроллера функцию вывода основных параметров по интерфейсу UART. После вычисления местоположения Солнца, микроконтроллер передает текущее значение времени, даты, порядковый номер дня, координаты местоположения, введенные при настройке, а также текущие значения высоты и азимута Солнца. Каждый параметр начинается с символа “$” и заканчивается символами “\r”, “\n”. Эти данные можно посмотреть на компьютере, подключив трекер через USB-UART переходник. В настройках терминальной программы нужно установить следующие настройки: cкорость передачи 9600 бит/сек, 8 бит данных, один стоповый бит. Ниже представлен скриншот с терминальной программы:![]()
Сервоприводы MG996R не защищены от попадания влаги внутрь корпуса, поэтому в случае наружного применения сервоприводы следует загерметизировать. Нужно отвернуть четыре болта с нижней стороны корпуса, и нанести нейтральный силиконовый герметик между стыками корпуса, также следует нанести герметик вокруг манжеты для ввода проводов в корпус. На шестерни редуктора можно дополнительно нанести смазку, так как заводская практически отсутствует. По отзывам, лучше всего подходит смазка ШРУС-4, в отличие от литола, она не замерзает на холоде. Для герметизации верхнего отверстия, на выходной вал можно надеть силиконовое кольцо, при этом нужно снять фаску с переходной муфты, которая устанавливается на вал, чтобы не создавать избыточного трения.
К несущему кронштейну я прикрепил прямоугольную текстолитовую пластину, на которую с помощью двухстороннего скотча приклеил солнечную батарею. Так как большую часть времени сервоприводы обесточены, то возможен поворот вала по высоте под действием тяжести солнечной батареи. Чтобы избежать этого, я прикрепил по бокам несущего кронштейна длинные противовесы, изготовленные из уголков и пластин. Изменяя массу противовесов, я сбалансировал конструкцию по оси вращения высоты.
Трекер выполняет наведение, когда Солнце находится над горизонтом, то есть когда его высота больше 0⁰. Когда Солнце заходит за горизонт (отрицательное значение высоты), трекер направляет солнечную батарею на Восток, дальнейшее слежение возобновляется с восходом Солнца. Слежение выполняется по всей видимой области неба.
Суточное движение Солнца и звезд, можно посмотреть на компьютере в программе Stellarium, это свободный виртуальный планетарий, который отображает реалистичное звездное небо. Программа отображает движение светил по небосводу, можно посмотреть положение Солнца и звезд на любой момент времени, также доступны данные о всевозможных координатах.
Я смонтировал устройство на печатной плате, которую разработал под размеры корпуса GAINTA G1202G. На плате имеется место под джампер (перемычку), с помощью которого можно отключать питание цифрового индикатора.
Полевой транзистор VT1 можно заменить на IRLML2244, IRLML6402. Также можно использовать транзисторы в корпусе SOIC-8 (придется переделать плату): IRF9332, IRF9310, IRF9317.
При отрицательных температурах Li-ion аккумуляторы теряют значительную емкость (происходит замерзание электролита), использовать аккумуляторы при температурах ниже +5 ⁰C не рекомендуется, так как это приводит к преждевременному сокращению ресурса. Поэтому если планируется эксплуатировать трекер в морозную погоду, то лучше использовать литий-железно-фосфатный аккумулятор LiFePO4. Аккмуляторы такого типа более морозостойкие, диапазон рабочих температур от -30 ⁰C до +55 ⁰C, максимальное напряжение 3,65В, минимальное 2В, среднее 3,3В, то есть ниже чем у Li-ion. Также к преимуществам можно отнести стабильное напряжение разряда, близкое к 3,2В. В конце статьи приведены ссылки для заказа аккумулятора, а также на модуль для заряда.
На основе солнечного трекера можно создать небольшую автономную систему, которая не требует внешнего питания, например удаленная метеостанция, или охранная система для дачи,и т.д. Можно заменить сервоприводы на более мощные, и установить солнечную панель побольше. Можно приспособить схему для солнечных панелей на 12, 18В, для заряда нескольких последовательно соединенных аккумуляторов, но для этого придется изменить схему, и использовать другие модули заряда.
Ниже представлены ссылки для заказа модулей и комплектующих для сборки солнечного трекера:
Солнечная батарея 6В 4,5Вт
Модуль часов реального времени DS3231
Цифровой индикатор на драйвере MAX7219
Модуль заряда Li-ion аккумулятора на TP4056
Аккумулятор LiFePO4 6500mah
Аккумулятор LiFePO4 1800mah
Модуль заряда LiFePO4 аккумулятора
Сервопривод MG996R
Кронштейны для сборки альт-азимутальной установки под сервоприводы MG996R
Повышающий преобразователь на MT3608
![]()
![]()
![]()
![]()
![]()
![]()
После начала использования солнечных батарей для производства электроэнергии в промышленных масштабах инженеры и проектировщики стали искать способы по повышению эффективности таких электростанций. Общая дисперсия света Солнца, которая определяется изменением направления падения солнечных лучей на фотоэлементы, не позволяла эффективно использовать солнечные батареи в течение всего светового дня. Выход из такой ситуации был найден достаточно быстро – солнечные панели стали устанавливать на подвижном основании, подключенном к системе слежения за Солнцем.
Как известно, для получения максимальной мощности от солнечных батарей необходимо, чтобы солнечные лучи попадали на плоскость батарей перпендикулярно. При таком направлении лучей КПД солнечных батарей может достигать 50-55%. Для стационарно установленных батарей этот показатель может снижаться до 10-15% из-за изменения угла падения солнечных лучей.
Устройство слежения за движением Солнца состоит из двух основных частей:
1. Схема управления, которая и определяет положение Солнца. Простейшая схема устройства слежения за солнцем или по-другому трекер (Solar Tracker) приведена ниже. Для определения позиции Солнца, используются два фоторезистора. В состав схемы входят:
- микросхема операционного усилителя LM1458 (К140УД20);
- транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В);
- фоторезисторы;
- диоды 1N4004 (КД243Г);
- резисторы и подстроечные резисторы.

2. Механизмы поворота и наклона батарей в зависимости от направления солнечных лучей. Механизм наклона позволяет использовать такие системы слежения в любых географических широтах: при установке солнечных батарей в местности, которая соответствует 320 северной широты, ось устройства должна быть повернута на 320 по отношению к горизонту. Привода всех механизмов системы слежения строятся на базе электродвигателей, на которые и воздействует система управления. Питание электродвигателей и системы управления осуществляется от самих солнечных батарей, поэтому такие установки автономны.
Как видно, схема и устройство солнечного трекера достаточно просты. Естественно, что в промышленных масштабах используют более сложные системы, однако подобную схему можно собрать самостоятельно для бытовой установки по производству электроэнергии на основе солнечных батарей.

Сеть содержит не малое количество готовых схем и решений по системам слежения за Солнцем. Так что, если возникла потребность усовершенствовать конструкцию солнечных батарей и повысить их производительность, всегда есть возможность сделать это самостоятельно.
До сих пор при эксплуатации солнечных батарей мы довольствовались общей дисперсией солнечного света. Правда, учитывались некоторые сезонные изменения, а также время суток (ориентирование в направлении восток - запад). Тем не менее солнечные батареи оставались более или менее зафиксированными в однажды найденном рабочем положении. В ряде случаев мы даже не придавали этому особого значения, приблизительно выставляя батарею в направлении солнца.
Однако из опыта известно, что солнечные элементы генерируют максимальную энергию, только когда они располагаются точно перпендикулярно направлению солнечных лучей, а это может случиться только один раз в день. В остальное время эффективность работы солнечных элементов составляет менее 10%.
Предположим, что вы смогли проследить за положением Солнца на небосклоне? Другими словами, что случилось бы, если бы вы поворачивали солнечную батарею в течение дня так, чтобы она всегда была направлена непосредственно на солнце? Только благодаря изменению этого параметра вы повысили бы полную отдачу от солнечных элементов приблизительно на 40%, что составляет чуть ли не половину вырабатываемой энергии. Это означает, что 4 ч полезной солнечной интенсивности автоматически превращаются почти в 6 ч. Следить за солнцем совсем не сложно.
Принцип работы следящего устройства
Следящее устройство состоит из двух частей. Одна из них объединяет механизм, приводящий в движение приемник солнечного излучения, другая - электронную схему, управляющую этим механизмом.
Был разработан ряд методов слежения за солнцем. Один из них основан на креплении солнечных элементов на держателе, параллельном полярной оси. Возможно, вы слышали о подобных устройствах, называемых экваториальными следящими системами. Это популярный термин, используемый астрономами.
Благодаря вращению Земли нам кажется, что Солнце движется по небосклону. Если бы мы учли это вращение Земли, Солнце, образно выражаясь, "остановилось" бы.
Подобным образом действует экваториальная следящая система. Она имеет вращающуюся ось, параллельную полярной оси Земли.
Если закрепить за ней солнечные элементы и вращать их вперед и назад, получится имитация вращения Земли (рис. 1). Оси, сонаправленной с осью вращения Земли.
Угол наклона оси (полярный угол) определяется географическим положением и соответствует широте места, в котором смонтировано устройство. Предположим, вы живете в местности, соответствующей 40°с.ш. Тогда ось следящего устройства будет повернута на угол 40° к горизонту (на Северном полюсе она перпендикулярна поверхности Земли (рис. 2).

Рис.2
Вращение солнечных элементов на восток или запад относительно этой наклонной оси будет имитировать движение солнца по небосклону. Если мы будем поворачивать солнечные элементы с угловой скоростью вращения Земли, мы сможем полностью "остановить" Солнце.
Это вращение осуществляется механической системой следящего устройства. Для вращения солнечных элементов вокруг оси необходим двигатель. В любой момент суточного движения солнца плоскость солнечных батарей будет теперь перпендикулярна направлению солнечных лучей.
Электронная часть следящего устройства выдает ведущему механизму информацию о положении Солнца. По электронной команде панель устанавливается в нужном направлении. Как только солнце сместится к западу, электронный регулятор запустит электродвигатель до тех пор, пока снова не восстановится нужное направление панели на солнце.
Характеристики следящего устройства
Новизна нашего следящего устройства состоит не только в осуществлении ориентации солнечных элементов на солнце, но и в том, что они питают управляющий электронный "мозг". Это достигается благодаря уникальной комбинации конструктивных и электрических характеристик устройства.
Рассмотрим сначала особенности конструкции устройства, обратившись к рис. 3.

Рис.3
Солнечная батарея состоит из двух панелей, содержащих по три элемента, соединенных последовательно и размещенных на плоскостях прозрачного пластмассового корпуса. Панели соединены параллельно.
Эти панели монтируются под прямым углом друг к другу. В результате по крайней мере один из модулей будет постоянно освещен солнцем (с учетом рассмотренных ниже ограничений).
Сначала рассмотрим случай, когда все устройство расположено так, что биссектриса угла, образованного панелями, направлена точно на солнце. При этом каждая панель наклонена под углом 45° к солнцу (рис. 4) и вырабатывает электрическую энергию.

Рис.4
Если повернуть устройство на 45° вправо, правая панель займет параллельное положение, а левая - перпендикулярное солнечным лучам. Теперь только левая панель генерирует энергию, правая - бездействует.
Повернем устройство еще на 45°. Свет продолжает попадать на левую панель, но под углом 45°. Как и раньше, правая сторона не освещается и, следовательно, не генерирует никакой энергии.
Можно повторить подобное вращение и в левую сторону, при этом правая панель будет генерировать энергию, а левая - бездействовать. В любом случае хотя бы одна батарея вырабатывает электроэнергию. Поскольку панели соединены параллельно, устройство всегда будет вырабатывать электроэнергию. Во время нашего эксперимента модуль вращался на 180°.
Таким образом, если конкретное устройство закрепить так, чтобы стык панелей был направлен на полуденное солнце, на выходе солнечной батареи всегда будет вырабатываться электрическое напряжение независимо от положения солнца на небосклоне. От рассвета и до заката какая-то часть устройства будет освещаться солнцем.
Прекрасно, но зачем все это? Сейчас узнаете.
Электронная система слежения за солнцем
Чтобы следить за движением солнца по небосклону, электронная схема управления должна выполнять две функции. Прежде всего она должна решить, есть ли вообще необходимость в слежении. Нет смысла тратить энергию на работу электромотора, если отсутствует достаточное солнечное освещение, например при наличии тумана или облачности. Вот для какой цели прежде всего необходимо описанное выше устройство!
Чтобы понять принцип его действия, обратимся к электронной схеме, приведенной на рис. 3. Сначала сконцентрируем свое внимание на реле RL1. Для упрощения дальнейших рассуждений предположим, что транзистор Q1 находится в состоянии насыщения (проводит ток), а транзистор Q2 отсутствует.
Реле RL1 - элемент схемы, реагирующий на протекающий через него ток. В реле имеется проволочная катушка, в которой энергия электрического тока преобразуется в энергию магнитного поля. Напряженность поля прямо пропорциональна силе тока, протекающего через катушку.
При увеличении тока наступает момент, когда напряженность поля возрастает настолько, что якорь реле притягивается к сердечнику обмотки и контакты реле замыкаются. Этому моменту соответствует так называемый порог срабатывания реле.
Теперь ясно, почему реле используется при измерении пороговой интенсивности солнечной радиации с помощью солнечных элементов. Как вы помните, ток солнечного элемента зависит от интенсивности света. В нашей схеме к реле фактически подключены две солнечные панели, и пока они не генерируют ток, превышающий порог срабатывания, реле не включается. Таким образом, именно количество падающего света определяет порог срабатывания.
Если сила тока чуть меньше минимального значения, то схема не работает. Реле и солнечная батарея подобраны так, что реле срабатывает при интенсивности света, достигающей 60% от максимальной величины.
Так решается первая задача следящей системы - определение уровня интенсивности солнечного излучения. Замкнутые контакты реле включают электродвигатель, и система начинает искать ориентацию на солнце.
Вот мы и подошли к следующей задаче, а именно к нахождению точной ориентации солнечной батареи на солнце. Для этого вернемся к транзисторам Q1 и Q2.
В коллекторной цепи транзистора Q1 стоит реле. Чтобы включить реле, необходимо закоротить транзистор Q1. Резистором /?1 задается ток смещения, которым открывается транзистор Q1.
Транзистор Q2 представляет фототранзистор, его базовая область освещается светом (у обычных транзисторов на базу подается электрический сигнал). Ток коллектора фототранзистора прямо пропорционален интенсивности света.
Резистор R1 кроме того, что он задает ток смещения транзистора Q1, используется также в качестве нагрузки транзистора Q2. Когда база транзистора Q2 не освещается светом, коллекторный ток отсутствует и весь ток, проходящий через резистор R1, течет через базу, насыщая транзистор Q1.
По мере увеличения освещения фототранзистора начинает течь коллекторный ток, который протекает только через резистор R1. Согласно закону Ома, увеличение тока через фиксированный резистор R1 приводит к возрастанию на нем падения напряжения. Таким образом, изменяется и напряжение на коллекторе Q2.
Когда это напряжение станет меньше 0,7 В, произойдет предсказанное явление: пропадает смещение транзистора Q1 в силу того, что ему требуется по крайней мере 0,7 В, чтобы протекал базовый ток. Транзистор Q1 перестанет проводить ток, реле RL1 выключится, и его контакты разомкнутся.
Этот режим работы будет иметь место только тогда, когда транзистор Q2 направлен непосредственно на солнце. При этом поиск точной ориентации на солнце прекращается благодаря размыканию цепи питания двигателя контактами реле. Теперь солнечная батарея точно направлена на солнце.
Когда солнце уходит из поля зрения транзистора Q2, транзистор
Q1 включает реле и механизм снова приходит в движение. И опять находит солнце. Поиск повторяется многократно при движении солнца по небосклону в течение дня.
К вечеру интенсивность освещения падает. Солнечная батарея уже не может генерировать количество энергии, достаточное для питания электронной системы, и контакты реле размыкаются в последний раз. Ранним утром следующего дня солнце освещает батарею следящей системы, ориентированную на восток, и работа схемы начинается снова.
Аналогичным образом происходит размыкание контактов реле, если освещенность снижается из-за плохой погоды. Предположим, например, что с утра прекрасная погода и следящая система начала работу. Однако в полдень небо стало хмуриться и снижение освещенности привело к прекращению работы следящей системы до тех пор, пока небо снова не прояснится после полудня, а может быть, на следующий день. Когда бы это ни произошло, следящая система всегда готова возобновить работу.
Конструкция
Смастерить устройство слежения достаточно просто, поскольку значительная часть деталей изготовляется из органического стекла.
Однако очень важным моментом является согласование характеристик солнечных батарей и реле. Необходимо отобрать элементы, генерирующие ток 80 мА при максимальной интенсивности солнечного излучения. Отбор можно осуществить с помощью тестирования. Для этой цели вполне подойдет этот тестер.
Я обнаружил, что серповидные элементы выдают в среднем ток около 80 мА. Поэтому из всех типов элементов, поступающих в продажу, для своего устройства я использовал именно эти элементы.
Обе солнечные панели аналогичны по конструкции. Каждая содержит три элемента, которые соединены последовательно и прикреплены к пластинам из оргстекла размером 10x10 см2. Элементы будут постоянно подвержены воздействию окружающей среды, поэтому для них необходимо предусмотреть меры защиты.
Неплохо бы сделать следующее. Поместите готовую батарею на пластину из оргстекла, положенную на плоскую металлическую поверхность. Сверху накройте батарею сравнительно толстым (0,05-0,1 мм) слоем лавсановой пленки. Основательно прогрейте полученную конструкцию паяльной лампой, чтобы пластмассовые детали расплавились и спаялись вместе.
При этом будьте осторожны. Если положить пластину из оргстекла на недостаточно плоскую поверхность или перегреть ее, она может покоробиться. Все должно происходить аналогично приготовлению сэндвича с сыром на гриле.

Рис.5
По окончании проверьте надежность герметизации, в особенности по краям солнечных элементов. Может быть, потребуется слегка обжать края лавсана, пока он еще горячий.
После того как панели достаточно остынут, склейте их вместе согласно рис. 5 и соедините их параллельно. Не забудьте припаять к батареям выводы, прежде чем собирать устройство.
Электронный мозг
Следующим важным элементом конструкции является реле. Практически реле представляет собой катушку, намотанную на герконовый контакт небольшого размера.
Обмотка реле состоит из 420 витков эмалированного медного провода № 36, намотанного на каркас достаточно малого размера, чтобы в него с натягом входил герконовый контакт. Я использовал в качестве каркаса соломинку для коктейля. Если вы прикоснетесь горячим лезвием ножа к концам соломинки, образуются как бы щечки каркаса, предохраняющие обмотку от сползания за края. Полное сопротивление обмотки должно составлять 20-30 Ом. Вставьте геркон в каркас и зафиксируйте его каплей клея.
Затем присоедините к реле транзистор Q1 и резистор R1. Не подключая транзистор Q2, подайте электропитание от солнечных элементов и проверьте работоспособность схемы.
Если все работает правильно, реле должно срабатывать, когда интенсивность солнечного света составляет около 60% полной интенсивности. Для этого можно просто прикрыть 40% поверхности солнечных элементов непрозрачным материалом, например картоном.
В зависимости от качества геркона, возможно, будут наблюдаться некоторые отклонения от идеального значения. Приемлемо начало работы реле при интенсивности света, составляющей 50-75% максимально возможной величины. С другой стороны, если вы не уложились в эти пределы, необходимо изменить либо количество витков обмотки реле, либо ток солнечной батареи.
Количество витков обмотки реле следует менять в соответствии со следующим правилом. Если реле срабатывает раньше, количество витков необходимо уменьшить, если позже - увеличить. Если вы хотите поэкспериментировать с изменением тока солнечной батареи, подключите к ней шунтирующий резистор.
Теперь подсоедините к схеме фототранзистор Q2. Его надо поместить в светонепроницаемый корпус, иначе он не будет правильно работать. Для этого возьмите медную или алюминиевую трубу длиной около 2,5 см и диаметром, соответствующим диаметру корпуса транзистора.
Один конец трубы следует расплющить так, чтобы осталась щель шириной 0,8 мм. Закрепите трубу на транзисторе.
Готовая схема управления, содержащая элементы Q1, Q2, R1 и RL1, с целью герметизации заливается жидким каучуком.
От устройства выводятся четыре привода: два - от контактов реле, два - от солнечных батарей. Для заливки жидкого каучука используется форма из плотной бумаги (типа почтовой карточки). Для ее изготовления листом бумаги оберните карандаш и закрепите бумагу, чтобы она не развернулась После засыхания слоя полимера вокруг схемы удалите бумажную форму.
Работа с устройством
Эксплуатировать следящее устройство достаточно просто. Для начала соберите несложный следящий механизм.
Укрепите вашу батарею на вращающейся оси. Вы можете закрепить батарею на подходящей раме, после чего присоединить раму к трубе, используя подшипники трения или качения. Затем установите мотор с редуктором для вращения рамы вокруг оси. Это можно сделать множеством способов.
Поскольку реле выполняет лишь функции включения и выключения в электронной схеме, необходимо иметь элементы, которые переключали бы напряжение вращения электромотора. Для этого необходимы концевые выключатели, располагаемые в крайних положениях рамы. Они подключаются согласно схеме, приведенной на рис. 6. Концевой выключатель № 1 включен на рис. 6 неверно. Для обеспечения правильной работы схемы выводы концевого выключателя необходимо подключить параллельно контактам реле RL1, включенным последовательно с реле.

Рис.6
Из рисунка видно, что это простая схема переключателя полярности При подаче питания электромотор начинает вращаться. Направление его вращения зависит от полярности источника питания.
В момент подачи питания реле переключения полярности RL1 не срабатывает, потому что цепь питания его обмотки разорвана нормально разомкнутыми контактами. Электромотор вращает раму по направлению к концевому выключателю № 1. Этот выключатель расположен так, что рама упирается в нею только в крайнем положении своего вращения. Автор одинаково обозначает на схемах рис 3 и 6 различные реле. Во избежание путаницы в дальнейшем реле RL1 на рис 3 называется герконовым реле следящей системы, а его контакты на рис 6 называются герконовыми. Реле RL1 на рис 6 - более мощное, чем герконовое, с тремя группами переключающих контактов.
При замыкании этого выключателя срабатывает реле RL1, которое меняет полярность питающего напряжения электромотора, и последний начинает вращаться в противоположном направлении. Хотя концевой контакт № 1 снова размыкается, реле остается включенным благодаря тому, что его контакты замкнуты.
При нажатии рамы на концевой выключатель № 2 цепь питания реле RL1 размыкается и реле выключается. Направление вращения мотора снова изменяется, и слежение за небосводом продолжается.
Цикл прерывается только с помощью герконового реле RL 1 из схемы слежения за интенсивностью солнечного излучения, которое управляет схемой питания электромотора. Однако реле RL 1 - слаботочный прибор и не может непосредственно коммутировать ток мотора. Таким образом, герконовое реле коммутирует вспомогательное реле, которое управляет электромотором, как показано на рис. 6.
Солнечные батареи системы слежения необходимо расположить вблизи механизма вращения. Угол их наклона должен совпадать о углом наклона полярной оси, а стык батарей направлен на полуденное солнце.
Электронный модуль подключается непосредственно к устройству вращения. Щель крышки фототранзистора сориентируйте параллельно полярной оси. Тем самым учитываются сезонные изменения в положении солнца над горизонтом.
- Рама велосипеда алюминий или сталь что лучше
- Материал рамы велосипеда
- Когда и как правильно сажать помидоры в теплицу Как высаживать помидоры в теплицу
- Выращивание чеснока из семян Как вырастить чеснок из семян стрелок
- Уложить ДСП на пол своими руками — довольно простая задача
- Самодельный приклад — от затыльника до спускового крючка Самодельное ложе для пневматики
- Мастер-класс упаковка подарка моделирование конструирование цельная коробочка с откидной крышкой бумага клей скотч